泛家居、汽車(chē)、3C智能製造全產業生態圈服務商
— 衝壓機械手 | 機器(qì)人與自動化 | 五金模具 | 塑膠模具 | 新能源 —

泛家居、汽車(chē)、3C智能製造全產業生態圈服務商
— 衝壓機械手 | 機器(qì)人與自動化 | 五金模具 | 塑膠模具 | 新能源 —
137 9403 5366
0757-22390755

谘詢(xún)熱線
0757-2239 0755作者: 瀏覽:102355 來源: 時間:2019-11-19
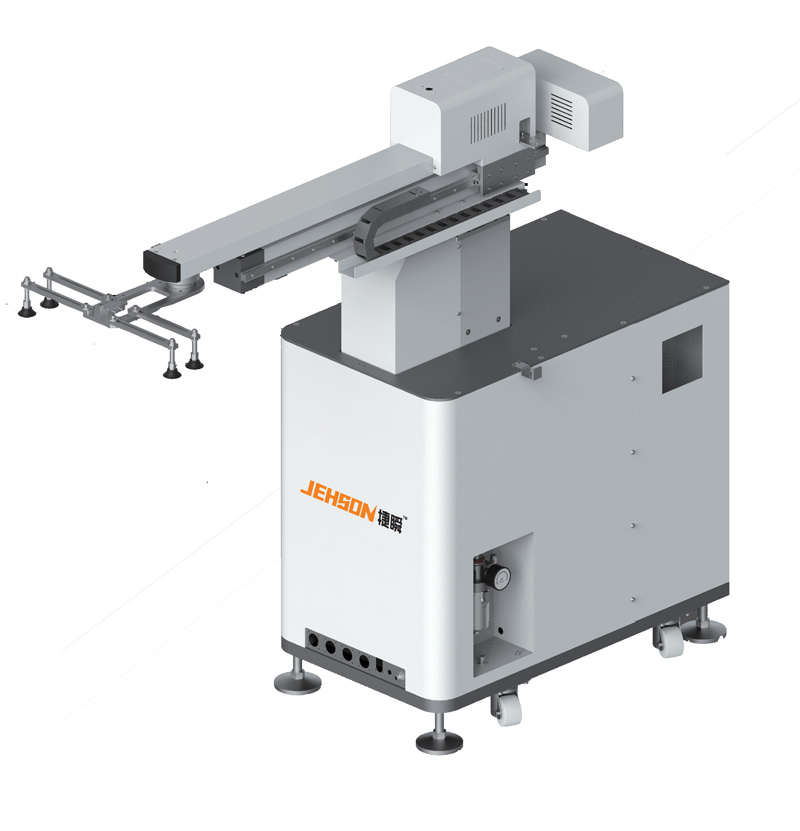
衝壓機械手的結(jié)構由氣體控製(zhì)機械手(shǒu)(1)、XY軸絲杆組(2)、轉台結構(3)、旋轉(zhuǎn)底座(4)等組成。衝壓機器人成本低,半年能回本(běn)。一台機械手大概在6-10萬,軸數不一樣,品牌不一樣都會影響價格。成本前期來說會是一筆不(bú)小的錢,可是按時間,月(yuè)份來算的話也就(jiù)相當於員工大半年的工(gōng)資。而(ér)且運作效(xiào)率(lǜ)非常之高,比起(qǐ)人工的出錯率(lǜ)要低很多。衝壓機械手在(zài)自動化設備(bèi)的基礎(chǔ)上,根據衝壓生產特點,專門為實現衝壓自動(dòng)化無人生產(chǎn)而研發的設備。能取代人工在各個衝壓工位上進行物料衝壓、搬運、上下料(liào)等工作,整條生產線效率達到5秒。工業機械(xiè)手製造商分析了工業機械手工作的控製模式。
衝壓機器人動作控製(zhì)方法(fǎ):
(1)伺服電機驅動的氣動機械手可以360度旋轉(用光電傳感(gǎn)器確定起點為0);
(2)衝壓機械手製造商采用步進電機驅動絲杠總成,使機械手沿X軸(zhóu)和Y軸(帶x軸和y軸限位開關)移動;
(3)組織可以是迂回轉盤(pán)360可驅動機器人
螺(luó)杆組轉動(dòng)自如(部分電傳動由直流電機、光(guāng)電編碼器、接近開關等組成(chéng));
(4)旋轉底座的主支架在3以上;
(5)通過夾送和氣體壓力控製來控製機器人的氣體(膨脹(zhàng)時所述機器人的把握,癟操縱器釋放)。
衝壓機械手的工作(zuò)過程如下:當貨物到達時(shí),機械手係統開始(shǐ)移動;步進電機控製開始向下移動,另一步(bù)進電機控製(zhì)水平軸(zhóu)開(kāi)始向(xiàng)前移動;伺服電機驅(qū)動機械手旋轉到抓住貨物的位置,然後充氣(qì),機械手抓住(zhù)貨物。

佛山市(shì)順德(dé)區91成人抖音精密模具自動化科技有限公司
廣東捷瞬機器(qì)人有限公司
廣東鑫碩精密科技有限公司
蕪(wú)湖91成人抖音智能科技有(yǒu)限公司
總部(廣東佛山(shān))地址:
佛山市順德區北滘鎮西海村烈士北(běi)路8號
137 9403 5366
安徽蕪湖公司:
安徽自由貿易試驗區蕪湖(hú)片區鳩(jiū)江經濟開(kāi)發(fā)區靈鳶路9號
服務谘詢熱線(xiàn):
137 9403 5366
0757-22390755
————


聯係電話
微信掃一掃
