泛家居、汽車、3C智能製造(zào)全產業生態圈服務(wù)商
— 衝壓機械(xiè)手 | 機器人與自動化 | 五金模具 | 塑膠模具 | 新能(néng)源 —

泛家居、汽車、3C智能製造(zào)全產業生態圈服務(wù)商
— 衝壓機械(xiè)手 | 機器人與自動化 | 五金模具 | 塑膠模具 | 新能(néng)源 —
137 9403 5366
0757-22390755

谘詢熱線
0757-2239 0755作者: 瀏覽:71588 來源: 時間:2019-10-02
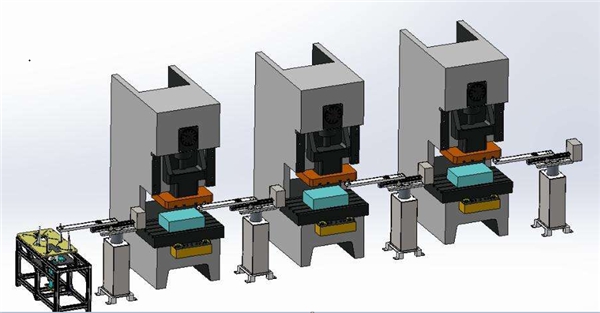
衝壓機械手製造商簡要分析了衝壓(yā)機械手自動化(huà)生產線(xiàn)的要求。衝壓機械手可分為單台單工(gōng)位、單台多工位衝壓機械手(shǒu)。單台(tái)單工位衝(chōng)壓機械手適合(hé)於較大型、片狀的(de)衝壓生產(chǎn)場合。一般配合片材(cái)發料器(qì)使用。而單(dān)台多工位衝壓機械手則更適(shì)合於小型工件的衝壓以及(jí)需要多個衝壓工序的加工場合,一般配合自動送料機以及圈料進行生產。衝壓自(zì)動化生產中為滿足衝壓零件形狀、尺寸、精(jīng)度(dù)、批量、原材料性能等(děng)方麵的要求,采用多種多樣的(de)衝壓加工方法。概括起來衝(chōng)壓加工可以分為分離工序與成形(xíng)工序兩大(dà)類。衝壓是依靠衝模(mó)和衝壓設備來完成加工,普通壓力機的行程次數為每分鍾可達幾十次,高速(sù)壓力(lì)要每分鍾可達數百次甚至千次以上,而(ér)且每次衝壓行程就可能得到一(yī)個衝(chōng)件。
用於衝壓生產的機器人將有以下三個要求:
1.負載(zǎi)大
2.運行軌跡和可(kě)靠的(de)性能
三。滿足頻繁啟動/製動、工作範(fàn)圍寬(kuān)、工件尺寸大(dà)、回轉麵積大的(de)要求。
通常,許多製造商(shāng)中(zhōng)的許多衝壓(yā)機器人在普(pǔ)通的搬(bān)運機器人如加長臂的基(jī)礎上增加了新的電機功率和減速器規格,並且廣泛地使用腳手架安裝結構來實現穩定性和便利性。
機器人係統的核心結構需要按自動化有(yǒu):工業以太網和現場總線次要網絡(luò)係統,其中,所述現場總線係統還可(kě)以(yǐ)攜帶安(ān)全總線。我們要好多了無縫集成到工廠MES係統的有(yǒu)效(xiào)集成智能控(kòng)製係統的能力
3、拆(chāi)垛係統
目(mù)前(qián)常用的碼垛係統有三種:
1.專用堆垛機/機器人
(1)專用堆垛(duǒ)機。其(qí)結構特點是將堆垛(duǒ)材料放置在移動式液壓升降平台車內,堆垛材料的高度依賴於光電傳(chuán)感器和液壓係統的控製來保(bǎo)持恒(héng)定(dìng),磁分離器(qì)依賴於氣動或電動分力器。
采用(yòng)圓筒驅動、基體排列的真空吸盤組堆碼,真空吸盤(pán)組垂直移動。拆下的板材(cái)由磁帶傳(chuán)送。
2.拆垛車廂/桁架機構
(2)機器人+卸(xiè)堆(duī)車廂。饋電結構的特(tè)征在於,放置在可移動滑架(jià)拆(chāi)垛堆;堆疊高度不控製材料,板厚計算依賴於機器人的自(zì)動調整(zhěng)卸垛吸入(rù)高度時;磁性分(fèn)離器片
支架安裝在碼垛(duǒ)小車上。支架可(kě)移動,有(yǒu)多個可自由旋轉的調節接頭。更換碼垛材料時,在碼垛材料周圍手動(dòng)放置磁力張緊器。在碼垛機器人端部撿拾器上安裝真空吸盤組和雙材料(liào)檢測傳感器。單片剝離材料由機器(qì)人放置在伸縮過渡(dù)段。傳送帶進行傳送。
3.拆(chāi)垛小車。
(3)桁架機械(xiè)手解堆小車。所(suǒ)述結構的(de)特點是:堆垛(duǒ)材料放置在可移(yí)動的卸料台(tái)車上;堆垛高度不受(shòu)控製;卸料時由計算的(de)板料(liào)厚度自動調節機械手的吸力(lì)高度;將磁分配器支架安(ān)裝在卸料台車上,支(zhī)架可轉換,具有多個支撐。
可自由旋轉的接頭可以調節,手動替換磁性隔離片疊層靠在周圍材料疊層的材料(liào);拆垛組和雙真空抽吸檢測安(ān)裝在該桁(héng)架機器(qì)人末端執行器傳感器(qì);分割成(chéng)一個單一的板材料置於由機器人上的伸縮中間皮帶傳動。
4、可伸(shēn)縮皮帶機
對於單個傳輸伸(shēn)縮帶式輸送機被卸垛板材之後完成,它可以用於清潔片提供所需的運(yùn)動速度通過機器。帶(dài)速度逆變器通常被控製,以確保與隨後的洗衣機,注油器同步。調整帶的長度,以填充清(qīng)潔(jié)紙不進行時,洗衣機(jī)空間脫機(jī)。

佛山(shān)市順德區91成人抖音(shuò)精密模具(jù)自動化科技有限公司
廣東捷瞬機器人有限公司
廣東(dōng)鑫碩精密科技(jì)有限公司
蕪(wú)湖91成人抖音智能科技有限公司(sī)
總部(廣東佛山)地址:
佛山市順德區北滘鎮西海(hǎi)村烈士北路8號(hào)
137 9403 5366
安徽蕪湖公司:
安(ān)徽自由貿易試驗區蕪(wú)湖(hú)片區鳩江經濟開發區靈鳶路9號(hào)
服務谘詢熱線:
137 9403 5366
0757-22390755
————


